Основы теоретической механики систем тел. С приложениями в робототехнике. Учебное пособие; Издательство ЛАНЬ, 2023
891 р.
- Издатель: Лань
- ISBN: 978-5-507-45089-3
EAN: 9785507450893
- Книги: Физические науки. Астрономия
- ID:13507773
Где купить (1)
Цена от 891 р. до 891 р. в 1 магазинах
| Магазин | Цена | Наличие |
|---|---|---|
| Магазин | Последняя известная цена | Обновлено |
|---|---|---|
| Лабиринт | 2372 р. | 21.11.2024 |
| МАЙШОП | 1440 р. | 23.06.2024 |
| Мегамаркет | 1384 р. | 24.12.2024 |
Описание
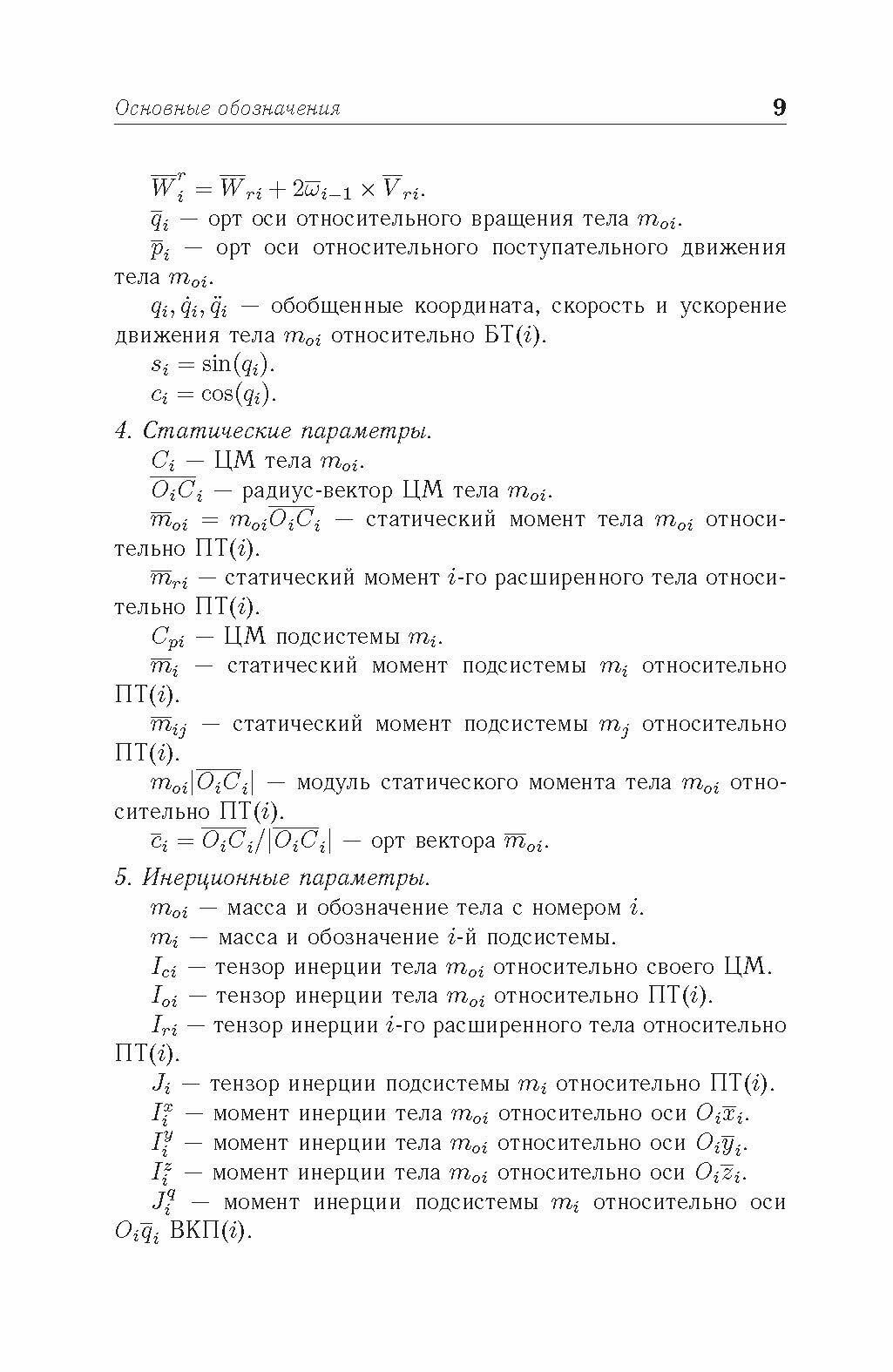
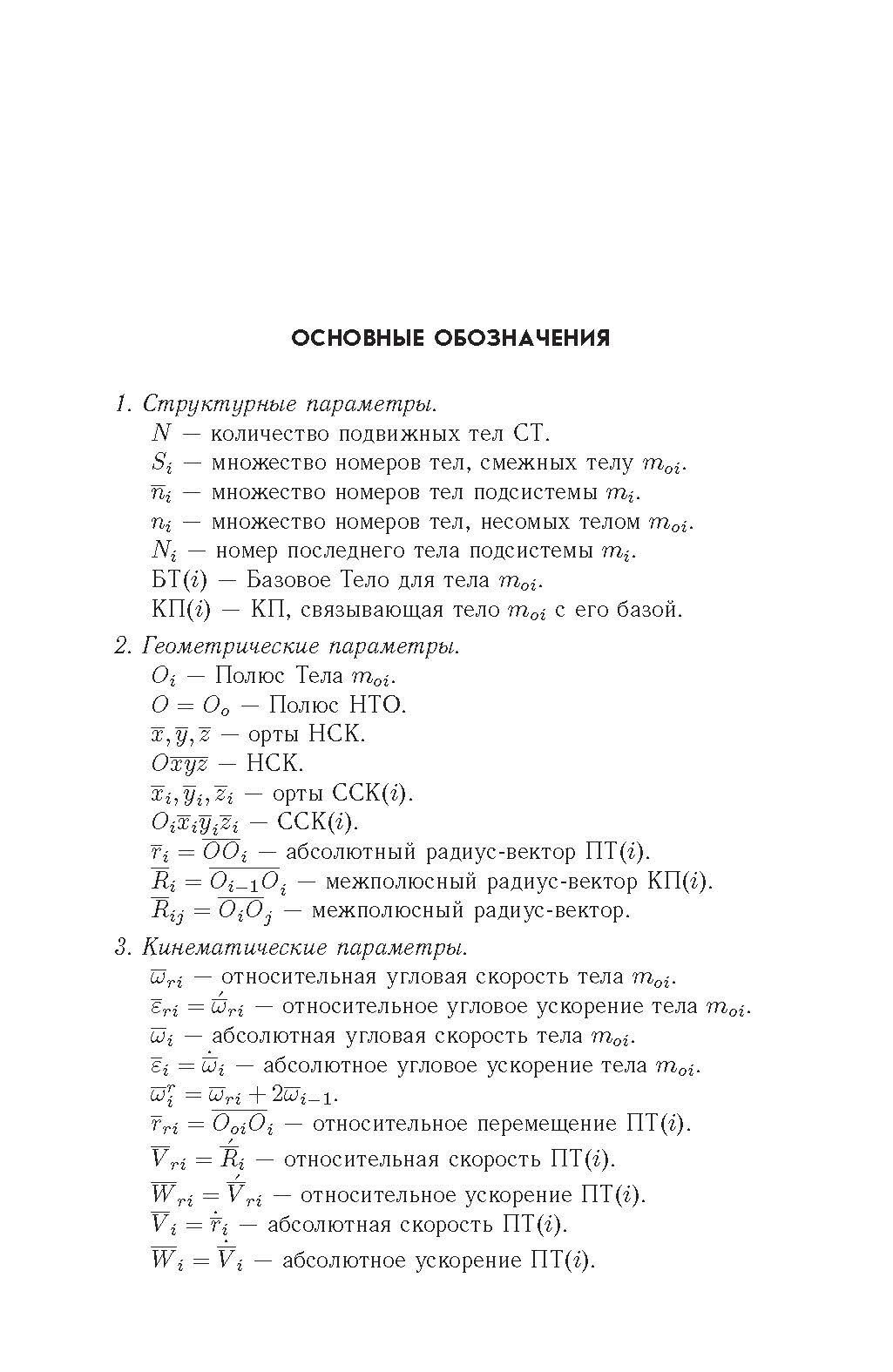
Рассматриваются произвольные системы абсолютно твердых тел, образующих друг с другом различные подвижные сочленения. Доказываются новые формулы вычисления динамических реакций в сочленениях тел, из которых выводятся уравнения динамики систем тел с поступательными и вращательными сочленениями и явно выраженными структурными параметрами. Излагаются формализмы выписывания уравнений динамики конкретных систем тел в аналитическом виде с явно выраженными входными постоянными геометрическими, кинематическими и инерционными параметрами, а также содержащими выражения инерционных сил и моментов сил (центробежных, Кориолисовых и гироскопических), зависящих от состояний тел, и выражения коэффициентов при ускорениях выбранных кинематических параметров (обобщенных координат, направляющих косинусов осей связанных систем координат тел, квазискоростей).
Книга рекомендуется в качестве учебного пособия для всех уровней и направлений подготовки в системе высшего образования, в которых предметом изучения и научного исследования являются управляемые системы тел, например, манипуляционные системы роботов, шагающие аппараты, подъемно-транспортные машины, орбитальные станции с манипуляторами на борту, роботизированные технологические комплексы, гиростаты, гироскопические системы, цифровые модели спортсменов, выполняющих спортивные упражнения.
Для усвоения теоретического материала и демонстрации практического использования изложенной теории рассмотрены 70 примеров, включающих примеры выписывания уравнений динамики манипуляционных систем роботов, содержащих от двух до шести подвижных тел в пространстве. Все уравнения верифицированы.
{kind=link}
Смотри также о книге.
О книге
| Параметр | Значение |
|---|---|
| Автор(ы) | А. И. Телегин |
| Издатель | Издательство ЛАНЬ |
| Год издания | 2023 |
| Серия | Высшее образование (Лань) |
| ISBN | 978-5-507-45089-3 |
| Обложка | твердый переплёт |
| Кол-во страниц | 252 |
| Формат | 84*108 1/32 |
| Тип обложки | твердая |
| Количество страниц | 252 |
| Издательство | Издательство "Лань" |
| Форматы электронной версии |
Отзывы (0)
Добавить отзыв
Книги: Физические науки. Астрономия - издательство "Лань"
Категория 712 р. - 1069 р.
Книги: Физические науки. Астрономия
Категория 712 р. - 1069 р.